Implementing Resonial: Phase Coordination for Multi-Agent AI World Models
Gritray Lab · Technical Blog v1.1
Resonial is a latent phase function that coordinates temporal behavior across agents in AI world models. This article provides a minimal implementation example and explains its conceptual motivation.
1. Motivation: Why Temporal Coordination Matters
Most AI world models predict what happens next, but they struggle with when and in what rhythm. Without a global phase signal:
- Visual events may appear incoherent (a person walks, a flag waves, and clouds drift — all at unrelated speeds)
- Multi-agent simulations may produce physically plausible but globally inconsistent behavior
- Emergent temporal patterns, like seasonal cycles or coordinated motion, are absent
Resonial addresses this by introducing a latent phase function that synchronizes agent behavior across time.
2. Core Concept
2.1 Resonial as a Latent Phase Function
Mathematically, Resonial can be represented as:
$$
\Theta(t) = f(\omega_1 t, \omega_2 t, \dots, \omega_n t; \phi_1, \phi_2, \dots, \phi_n)
$$
Where:
- $\omega_i$: fundamental frequencies (learned or preset)
- $\phi_i$: phase offsets per agent (learned or preset)
- $f$: configurable composition function that maps frequencies and offsets to a global phase signal
2.2 The Resonial-Fricial-Artifriction Triad
| Layer | Variable | Scope | Implementation |
|---|---|---|---|
| Fricial | $F(x, t)$ | Local contact forces | Physics engine (MuJoCo/Isaac Sim) |
| Artifriction | $\tilde{F}(x, t)$ | AI-inferred friction | Vision encoder + MLP |
| Resonial | $\Theta(t)$ | Global phase coordination | Latent network (this article) |
This triad enables AI to perceive forces, predict interactions, and maintain global temporal order.
3. Minimal Implementation in PyTorch
The following minimal implementation demonstrates a phase coordination layer for multiple agents:
import torch
import torch.nn as nn
class ResonialLayer(nn.Module):
"""
Minimal Resonial implementation for multi-agent world models.
"""
def __init__(self, n_agents: int, n_frequencies: int = 4, hidden_dim: int = 64):
super().__init__()
self.n_agents = n_agents
self.n_frequencies = n_frequencies
# Learnable fundamental frequencies (diurnal, seasonal, etc.)
self.omega = nn.Parameter(torch.randn(n_frequencies) * 0.1)
# Learnable phase offsets per agent
self.phi = nn.Parameter(torch.zeros(n_agents, n_frequencies))
# Composer: combines base phases with frequencies
self.composer = nn.Sequential(
nn.Linear(n_frequencies * 2, hidden_dim),
nn.SiLU(),
nn.Linear(hidden_dim, hidden_dim),
nn.SiLU(),
nn.Linear(hidden_dim, n_frequencies)
)
# Modulator: generates agent-specific phase scalar
self.modulator = nn.Sequential(
nn.Linear(n_frequencies + hidden_dim, hidden_dim),
nn.SiLU(),
nn.Linear(hidden_dim, 1)
)
def forward(self, t: float, agent_id: int = None):
base_phase = self.omega * t + self.phi
phase_input = torch.cat([base_phase, self.omega.expand(self.n_agents, -1)], dim=-1)
composed = self.composer(phase_input)
mod_input = torch.cat([composed, base_phase], dim=-1)
theta = self.modulator(mod_input).squeeze(-1)
if agent_id is not None:
return theta[agent_id]
return theta
Notes:
- Demonstrates a minimal working example for multi-agent phase coordination.
omegaandphiare learnable to adapt to diurnal, seasonal, or task-specific rhythms.- Each agent receives a scalar phase output, which can be extended to multi-dimensional latent vectors.
4. Visualization
The diagram below illustrates how the Resonial layer coordinates phase across multiple agents in a world model, while Fricial and Artifriction handle local interactions:
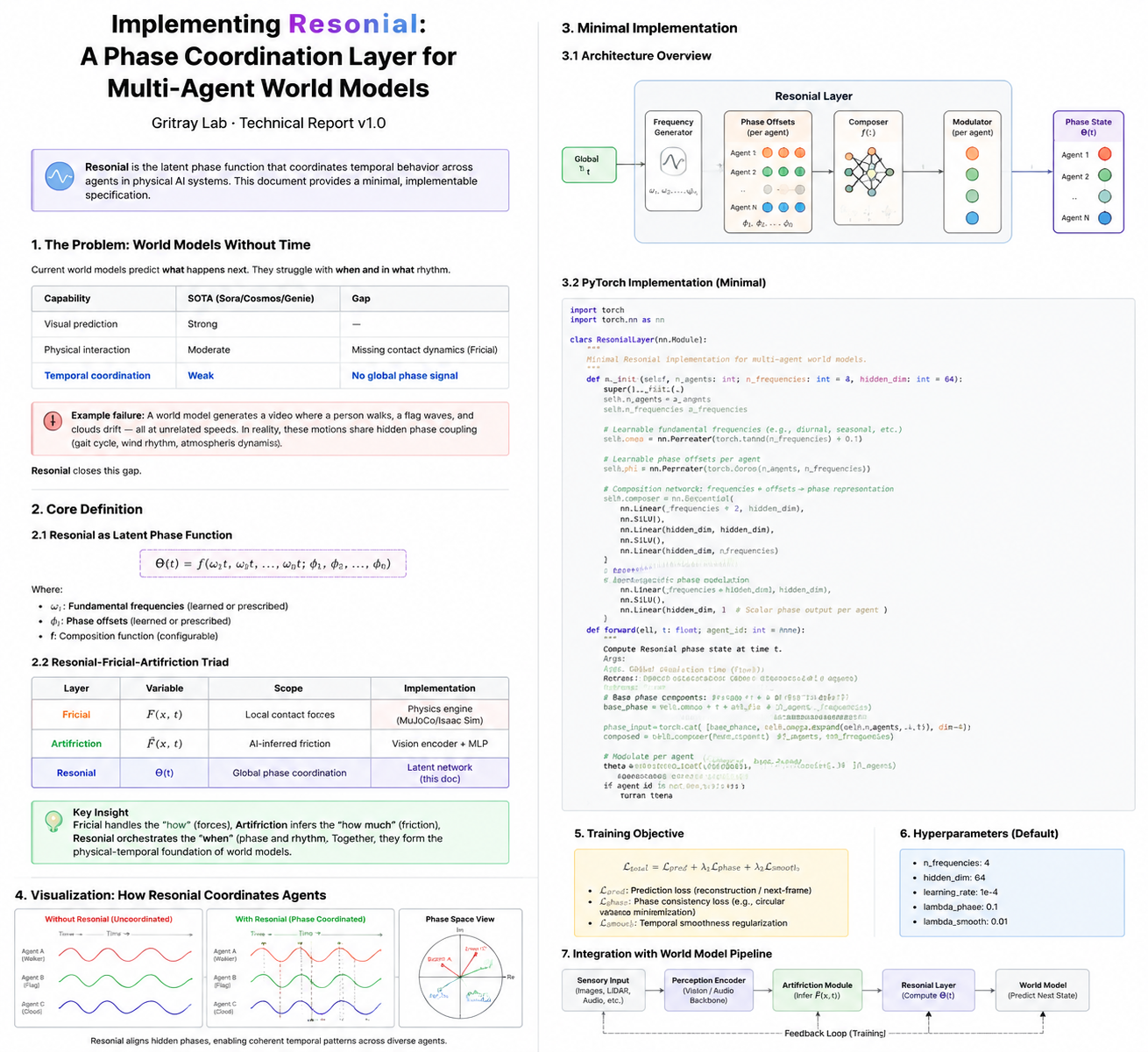
- Fricial: Local contact and resistance forces
- Artifriction: AI-inferred friction embedded in the world model
- Resonial: Global latent phase coordinating multiple agents over time
5. Applications
- Multi-Agent Simulation: Synchronize animations, gait cycles, and environmental rhythms.
- Robotics: Align robot motions in time-sensitive cooperative tasks.
- Virtual Environments: Provide realistic global temporal patterns in physics simulations or digital twins.
- AI World Models: Coordinate independent agents’ predictions to prevent simulation chaos.
6. Vision
Resonial complements Fricial (local contact dynamics) and Artifriction (AI-inferred friction) by adding a global temporal dimension. Together:
- AI agents perceive forces (Fricial)
- Embed frictional effects into decision-making (Artifriction)
- Follow coherent global rhythms (Resonial)
This triad enables world models to simulate reality in both space and time, bridging micro-scale interactions and macro-scale order.
This report is part of the Gritray Lab series on AI world model architectures. For further reading, see Fricial and Artifriction white papers.